PLECSのデモモデルに含まれている、この事例では、DFVC(Direct Flux Vector Control)を採用した、高速駆動永久磁石同期電動機システムを解析しています。
従来方式である回転子フレーム電流制御とは異なり、DFVCは固定子磁束と整合する同期フレームで動作し、 2つの基本的なPI制御器で磁束とトルクを直接制御することができます。 この制御方式は、正確な電動機パラメータ情報にあまり依存しないため、 特に、弱め磁束モードの電動機を駆動するのに適しています。
電源および電動機モデル
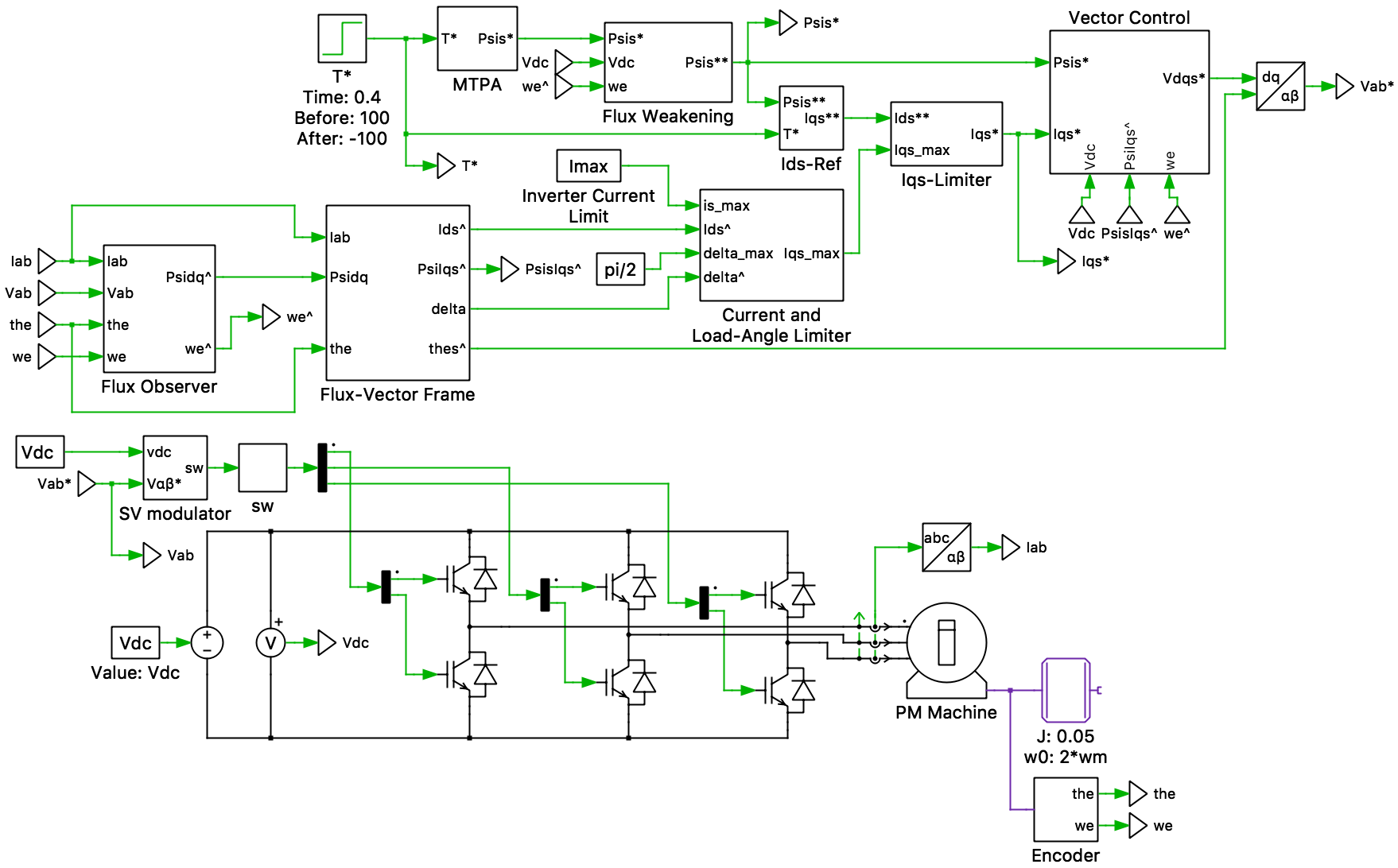
電圧形インバータ(VSI)では、直流電源を転流する三脚ブリッジを、 理想パワー半導体素子モデル(IGBT)を用いてモデリングしています。 6つのIGBTは空間ベクトル変調器によって制御され、インバータは指令された相電圧を出力します。 電動機の3相電流測定値とDCリンクの電圧測定値は、制御アルゴリズムにフィードバックされます。
電動機は、Ld > Lqの突極型永久磁石同期機で、 摩擦が考慮されていない慣性および、理想的な位置/速度センサに接続されています。
制御ロジック
制御システムへは電動機のトルク指令値が入力されます。 電動機の駆動効率を最適化するため、まず、「MTPA(Maximum Torque Per Ampere)」ブロックが、最適な磁束レベルを算出します。 電動機の磁束指令値は、電動機回転速度およびDCリンク電圧に依存するため、インバータから出力される利用可能な最大電圧に対応して低減する場合がありますが、 これは「Flux Weakening」ブロックによって実装され、過渡現象を制御器が処理するのに十分な電圧のマージンを確保します。
磁束指令値が算出されると、トルク生成電流成分:Iqs*が算出可能になります。 最小負荷角とインバータの電流制限に対応した値を算出する必要がありますが、 Iqs*の制限値は、基本的なPI制御器が含まれる「Current and Load-Angle Limiter」ブロックによって算出されます。
「Vector Control」ブロックは、磁束/電流の指令値と測定値を比較し、電動機に適用される適切な電圧ベクトルを算出します。 磁束制御がデカップリングしている場合、電流制御は磁束レベルと電動機回転速度の影響を受けるため、 電流/トルク経路上のPI制御器で、フィードフォワード項が必要になります。
電動機の磁束は直接、測定できないため、振幅と回転角度はオブザーバブロックによって算出されます。 算出される磁束は、電流ベース磁気モデルと電圧ベース積分値の融合値で、電流ベース磁気モデルは、主として積分が不正確な低速域で参照されます。
シミュレーション
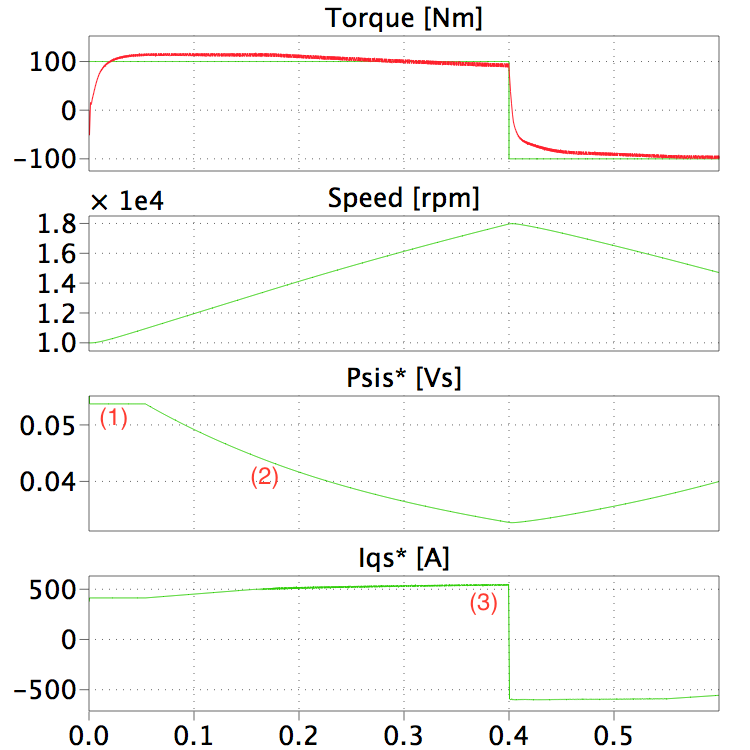
シミュレーションでは、「Flux Observer」ブロックによって算出されたトルク指令値+100 Nmが入力され、 シミュレーション開始50ミリ秒(下図の1)で、理想的なMTPA磁束レベルでトルクが発生していることが確認可能です。 しかし、電動機回転速度が基準速度を超えると、電流制限値に到達するまでの間(下図の3)、 磁束レベルは減少し、q軸成分電流は増加します(下図の2)。その後、トルク指令値が-100Nmに反転し、電動機は減速します。
Try it
モデルは、PLECS Blockset/Standaloneの「PLECSデモモデル」ライブラリに格納されています。