This PLECS demo model illustrates a servo drive application, combining the PLECS electrical, control and mechanical domains. The system includes an inverter with field-oriented control that supplies a servomotor coupled to a ball screw gear. The output of the gear is attached to a slide, which holds the part being position-controlled for manufacturing (e.g. milling) operations. An Optimal Speed Limit algorithm is included to enhance position control.
Power circuit
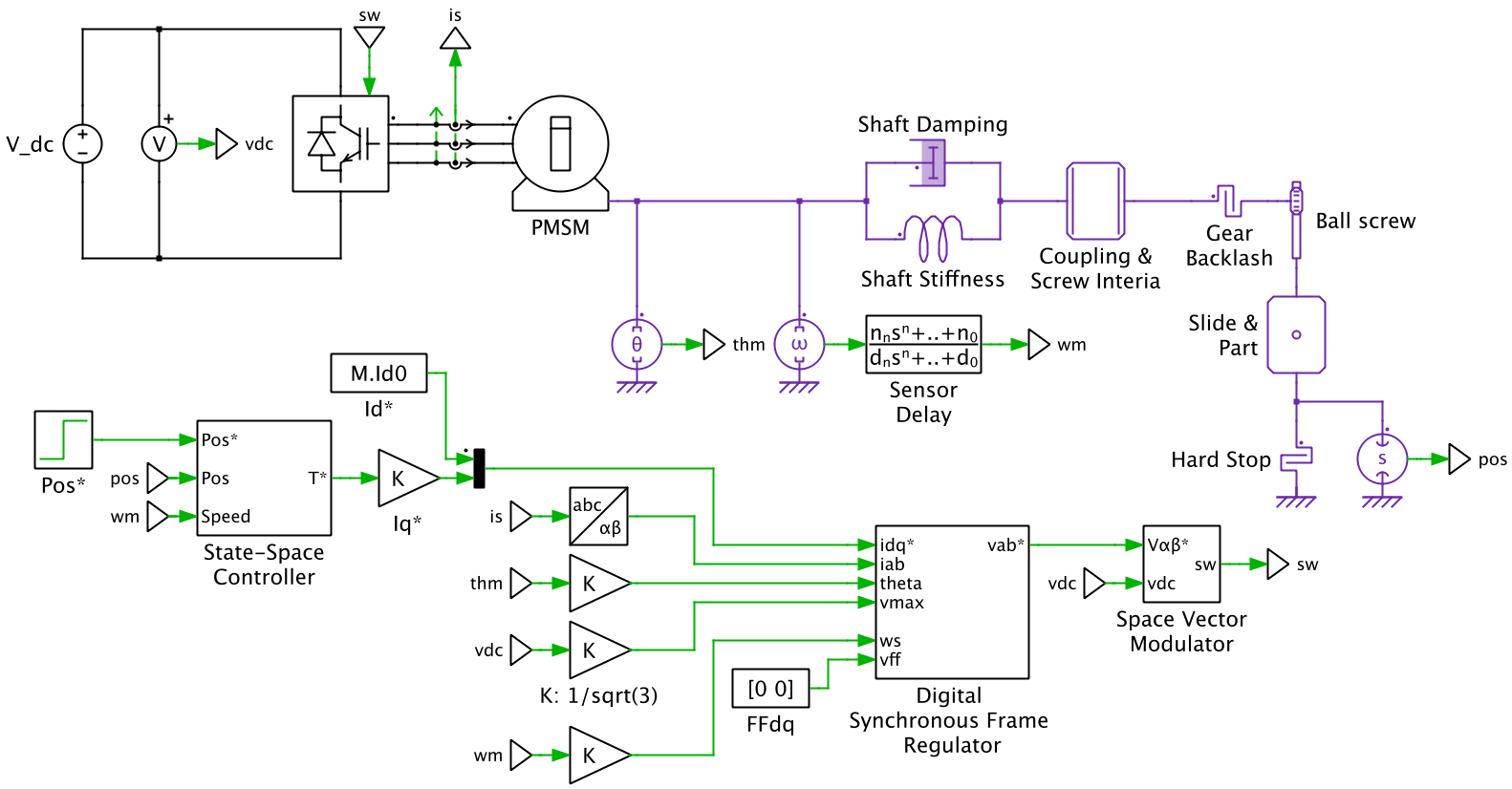
The inverter circuit is modeled as an ideal three-legged bridge with stiff DC supply. Space vector pulse-width modulation (SVPWM) is used to control the output voltage of the inverter. The three phase currents are being measured for closed-loop control.
Mechanical
The actuator consists of a synchronous machine with surface-mounted magnets (PMSM). Its output is coupled by means of a compliant shaft to the ball screw gear. The coupling between those two elements is modeled by an inertia and backlash component. The gear translates the rotational motion to a linear motion, which then moves a part along a slide. The part will collide with a hard stop at the end of the slide if not properly controlled.
Control
An advanced high-bandwidth state-space control is implemented for the positioning of the slide. The controller regulates both slide position and motor speed using internal state limiters and anti-windup mechanisms. Two choices are provided for limiting the motor speed: i) a fixed limit and ii) an optimum limit that is dynamically adjusted based on actual deviation from the target position. For large setpoint changes use of optimum speed limiting is necessary to avoid limit cycles.
The output of the state-space controller consists of a torque setpoint for the electric machine. It is translated into an equivalent quadrature current setpoint (iq*) that is controlled by a digital synchronous frame regulator. This regulator is numerically decoupled based on motor speed and also includes state-limiting and anti-windup mechanisms.
Simulation
The model can be first explored to observe how the part reaches a small change in the target position in a nicely damped fashion with a very small amount of overshoot. It can be seen that the drive never comes to a complete stop, but instead exhibits a sustained oscillation around the setpoint. Such “hunting” phenomena is caused by the backlash of the ball screw gear. Changing the associated parameters can reduce the oscillation.
Increasing the position step and using the Fixed Speed Limit will eventually show that this position control scheme is very poor for realistic processes. The slide may even hit the hard stop, followed by large oscillations until it reaches the setpoint. This phenomenon is a limit cycle caused by the electric machine not having sufficient torque to slow the slide before it is already far past its setpoint. As a consequence, the torque setpoint varies in a square-wave fashion between full throttle acceleration and deceleration. To eliminate this behavior the Optimum Speed Limit must be enabled. This advanced speed-limiting algorithm allows the position setpoint to be reached with a minimal amount of overshoot, settling in the shortest possible amount of time.
Try it
This model is available in the PLECS Demo Model library provided in both versions of PLECS.